B-Robot
Dzisiejszy temat to robot balansujący. Jest to świetna zabawka, odpowiednia również dla najmłodszych pasjonatów techniki z uwagi na prostotę i łatwość wykonania.
Konstrukcja została opublikowana przez autora na stronie : https://www.instructables.com/DIY-ESP32-Wifi-Self-Balancing-Robot-B-Robot-ESP32-/
Budowa mechaniczna składa się z elementów wydrukowanych na drukarce 3D, dwóch silników krokowych NEMA17 (po ok. 30 PLN – na Allegro – 17HS4401), koszyczka na 3 ogniwa Li-Ion – 18650, wyłącznika zasilania, „oponki” na koła i zestawu śrub, podkładek i nakrętek mocujących całość.
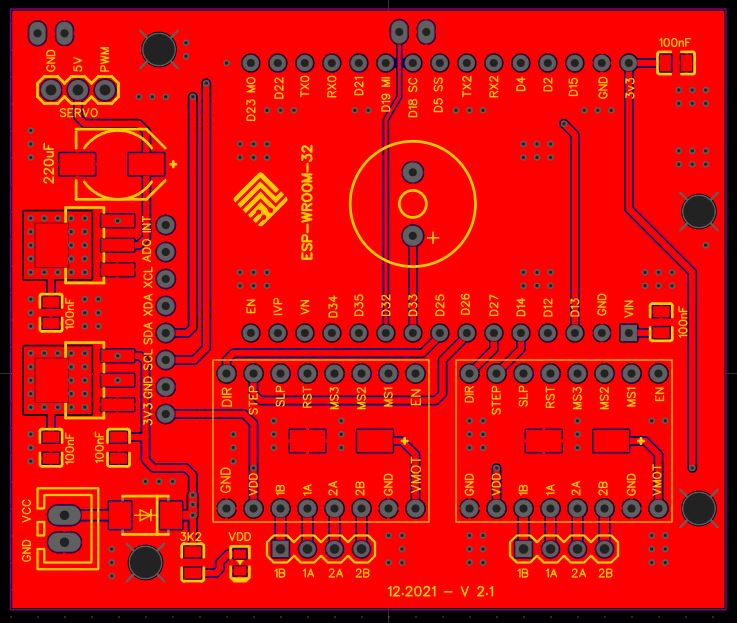
Elektronika to prosta płytka PCB zapewniająca zasilanie i połączenia elektryczne użytych (gotowych) modułów : sterownika na ESP32 (WROOM), czujnika żyro/akcelerometr – MPU 6050 (GY-521) i dwóch sterowników silnika krokowego – STEPSTICK A4988.
PCB wygląda tak (podobna do oryginalnej zaproponowanej przez autora) :
W źródłowym opracowaniu jest jeszcze serwomechanizm umożliwiający samodzielne podnoszenie/wstawanie. Robiłem z nim próby ale z niego zrezygnowałem z uwagi na zastosowane zasilanie (trzy a nie dwa ogniwa) i jego umiejscowienie. Montaż zasilania na samej górze ułatwia wymianę baterii, ale podnosi istotnie środek ciężkości zabawki i ramię z serwomechanizmem nie ma wystarczającej siły aby go postawić do pionu.
Wsad załadowany do ESP32 działa bez problemu bez najmniejszych przeróbek.
Kilka uwag do uruchomienia :
Bardzo ważna sprawą jest kwestia poprawnego podłączenia silników. Nie sugerujcie się kolorami kabelków – za każdym razem jak kupowałem silniki NEMA17 kabelki miały obsadę i kolorystykę „z kapelusza” – czysta loteria.
Aby zabawka prawidłowo się uruchomiła – po włączeniu – potrzebuje chwili spokoju (aby skalibrować gyro i accel) – musi być absolutnie nieruchomo. Włączam zasilanie, gdy stoi oparta o ścianę (nie trzymam w ręku). Reakcja silników – po kilku sekundach – jest znakiem że sprzęcik gotowy do pracy.
Urządzenie steruje się po Wi-Fi aplikacją ESP32 Wifi Balancing Robot pobraną ze sklepu Play (na iOS też chyba jest). Oczywiście po włączeniu robota należy się z nim połączyć (po Wi-Fi). Bez tego potrafi stabilnie stać (z małymi ruchami korygującymi)
Galeria :
























Filmiki działającego urządzenia :